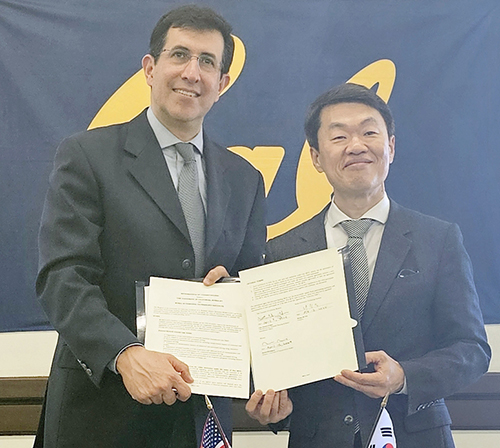
한국자동차연구원(한자연)은 UC버클리 교통연구소 소속 ‘PATH'(California Partners for Advanced Transportation Technology)와 ‘협력자율주행 및 취약 도로 사용자(VRU) 안전도 기술 협력을 위한 업무협약’을 맺었다고 18일(한국시간) 밝혔다.
PATH는 1986년 캘리포니아주 첨단 교통시스템 솔루션 개발을 위해 세워진 기관으로, 캘리포니아주 교통부와 UC버클리, 민관 연구기관이 함께 참여한다.
도로환경 정보를 주행에 활용해 자율주행의 한계를 극복하는 협력자율주행 안전 연구와 인공지능(AI), 대중교통 솔루션 등 지능형 교통시스템을 연구·개발한다.
이번 협약을 통해 한자연과 PATH는 협력자율주행과 VRU 안전 시스템의 공동 개발에 나설 예정이다.
VRU는 보행자 및 자전거·오토바이·개인형 이동장치(PM) 탑승자 등을 일컫는 말이다. 속도는 일반 차량에 비해 느리지만, 사고가 발생할 경우 피해가 크다.
나승식 한자연 원장은 “협력자율주행 및 VRU 안전도 향상 기술은 스마트 모빌리티의 핵심”이라며 “PATH와의 협력을 통해 관련 기술의 상용화뿐만 아니라 한미 산학연 간 연구를 잇는 교두보 역할을 하겠다”고 말했다.















































 단독 주택 54%까지 올라
단독 주택 54%까지 올라